
Forget human Error: AI-Powered Robot Now Dominating the Badminton Court
Table of Contents
Move over, pros! an AI-powered, four-legged robot is making waves in the world of badminton, demonstrating remarkable agility and precision. Could this be the future of sports training or even competitive play?
Researchers at ETH Zurich have developed a groundbreaking AI system that allows a legged robot to autonomously play badminton against human opponents. This isn’t your average factory robot; this machine can track the shuttlecock, predict its trajectory, and move wiht surprising speed and accuracy to return shots.
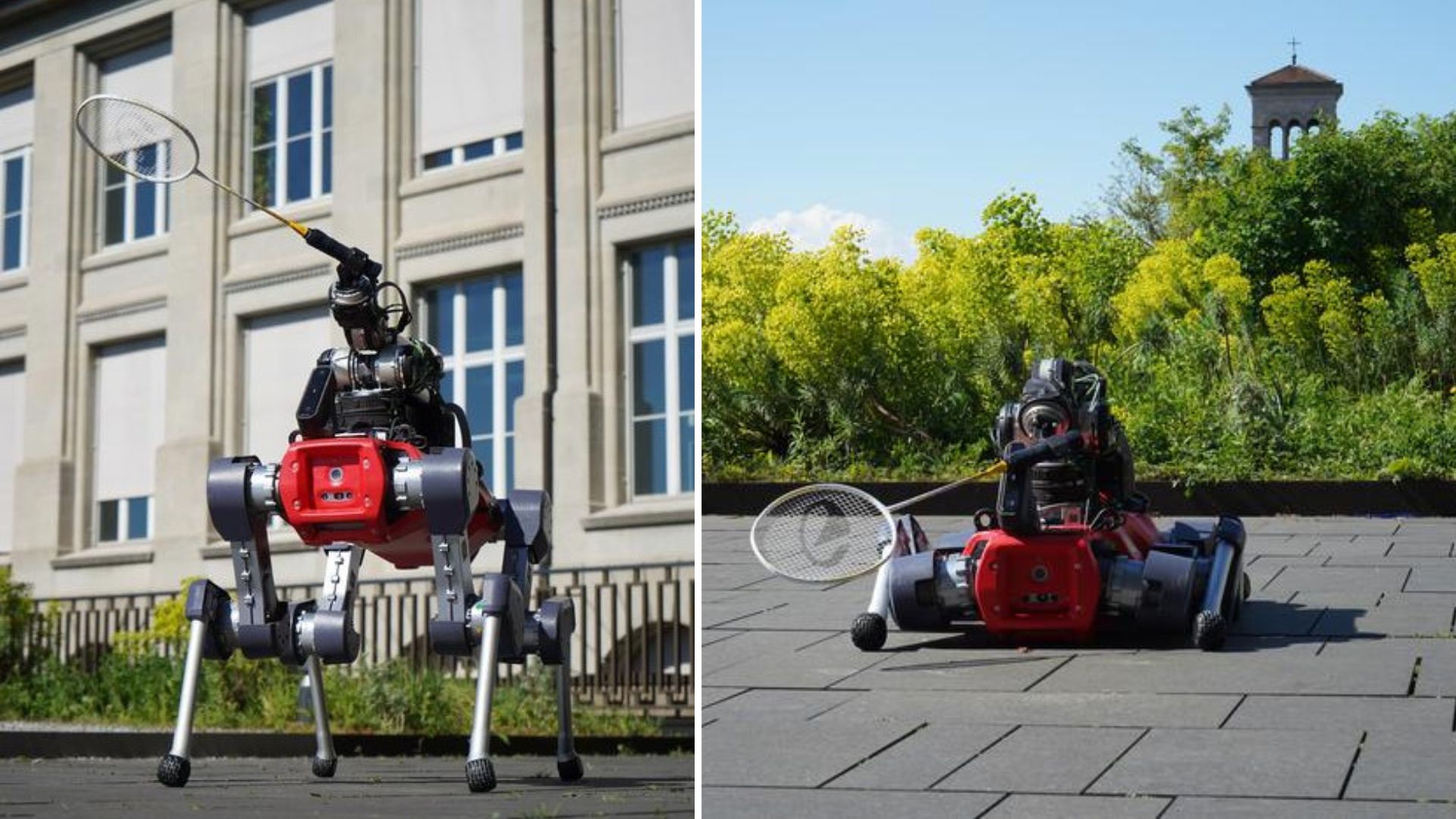
the robot, named ANYmal-D, is equipped with a stereo camera for visual perception and a specially designed arm to swing a badminton racket. The control system relies on reinforcement learning,a type of AI training that allows the robot to learn through trial and error,much like a human athlete honing their skills on the court.
The implications of this technology extend far beyond the badminton court. Beyond badminton, the method offers a template for deploying legged manipulators in other dynamic tasks where accurate sensing and rapid, whole-body responses are both critical,
researchers stated, highlighting the potential for applications in various fields.
The challenge: Replicating human Athleticism in a Robot
Badminton demands a unique combination of rapid footwork and precise arm movements. Think of it as a blend of tennis’s strategic court coverage and baseball’s split-second reaction time. Replicating this level of coordination in a robot is a monumental challenge.
One major hurdle is visual perception. human eyes are incredibly adept at tracking fast-moving objects, but commercial robot cameras often struggle with motion stabilization and focus. Imagine trying to hit a fastball with blurry vision – that’s the challenge these researchers faced.
While previous research has shown progress in robotic agility, such as robots performing flips or running, these often lacked integrated manipulation or relied on controlled environments.This new system,however,tackles the complexities of a dynamic,real-world sport.
the ETH Zurich team developed a unified, reinforcement learning-based controller for ANYmal-D. This system integrates legged locomotion and racket swinging, enabling the robot to track, predict, and return the shuttlecock in real time. A perception-aware model, trained in simulation, accounts for motion-induced visual errors, bridging the gap between the simulated world and reality.
The controller uses an asymmetric actor-critic framework and tracks multiple swing targets within each episode to learn continuous, responsive behavior. This approach balances agility and visual accuracy, incorporating shuttlecock prediction, constrained reinforcement learning, and dynamic system identification to perform reliably in real-world games.
According to Yuntao Ma, a researcher at ETH Zurich’s robotics Lab and co-author of the study, A key advantage of our approach is that the controller is trained end-to-end-upper and lower limbs are optimized together from the beginning… As a result, the limbs learn to compensate for each other’s dynamics naturally during training, leading to coordinated whole-body motion.
Robot vs. Human: The Badminton Showdown
The moment of truth: how dose the robot fare against human players? The team put ANYmal-D to the test, and the results were extraordinary. The robot could navigate the court to return shots at various speeds and angles, achieving rallies of up to 10 consecutive hits.
The integrated reinforcement learning approach links whole-body movement with visual perception,allowing the robot to adjust its gait based on timing and distance to track and intercept shuttlecocks traveling at speeds of up to 12.06 m/s. In a particularly impressive move, the robot could even rise onto its hind legs to keep the shuttlecock in view before swinging, prioritizing balance and safety to avoid falling – a move reminiscent of a seasoned basketball player fighting for position.
However, the robot isn’t quite ready to challenge Lin Dan just yet. It struggles against fast or aggressive shots, like smashes. The team attributes this limitation to hardware constraints in camera perception and actuator speed,rather than the control algorithm itself. Think of it like a quarterback with a brilliant mind but a slightly delayed release – the potential is there, but the physical limitations hold it back.
addressing the adaptability of the control framework to other sports or tasks, Ma stated, Yes, the framework is designed to generalize. We’ve already extended it to an accurate robotic throwing task. More broadly, we believe the most transferable contribution is our method for integrating active perception into the RL training loop. This capability broadly applies to tasks where perception and control must be tightly coordinated.
The Future of Robotic Athletes
While ANYmal-D’s badminton skills are impressive, there’s still room for betterment.one key area is perception responsiveness.the current system has an average delay of 0.375 seconds between the opponent’s shot and the robot’s first swing command. That’s a significant delay in a sport where milliseconds matter.
Reducing this latency, perhaps through faster cameras or additional sensing modalities, would greatly improve the robot’s ability to intercept faster and more distant shots, enabling longer rallies and more competitive performance,
Ma explained.
This research opens up exciting possibilities for the future of sports technology. Could AI-powered robots be used to develop personalized training programs, helping athletes improve their reaction time and technique? Could they serve as sparring partners, pushing athletes to their limits in a safe and controlled surroundings? Or could we one day see robots competing in their own sporting events, showcasing the pinnacle of AI and robotic engineering?
The possibilities are endless, and the world of sports may never be the same.
Key Takeaways: ANYmal-D vs.Human badminton Players
To better understand ANYmal-D’s capabilities and limitations, let’s examine a comparative snapshot:
| Feature | ANYmal-D AI Robot | Human Badminton Player |
|---|---|---|
| Visual Perception | Stereo camera, Perception-aware model to compensate for motion-induced errors.Susceptible to perception delays, especially with fast shots. | Highly developed visual processing, instant motion detection, and tracking. |
| Movement & Agility | Four-legged locomotion, integrated legged locomotion and racket swinging, Dynamic gait adjustment, including rising on hind legs for better vision. | Expert footwork, rapid court coverage, and adaptive movement across the court. |
| Shot Speed & power | Handles shots up to 12.06 m/s. Struggles with fast smashes due to hardware limitations (camera and actuator speed). | Superior shot power and varying shot speeds,Can execute powerful smashes and precise placements. |
| Reaction Time | Average delay of 0.375 seconds. | Significantly faster reaction times (milliseconds). |
| decision-Making | Reinforcement learning for trajectory prediction and shot selection, pre-programmed strategies. | Tactical play, adaptive strategies, anticipation, and creativity. |
While ANYmal-D showcases impressive skill in returning shots, the table clearly highlights areas where human players still hold a notable advantage, particularly in reaction time, power, and the ability to adapt to various game strategies.
FAQ: Decoding the Robotic Badminton Revolution
Hear are answers to some frequently asked questions about ANYmal-D and the future of AI in sports:
How does ANYmal-D actually “see” the shuttlecock?
ANYmal-D uses a stereo camera system, much like how humans have two eyes.This system captures visual information and feeds it to a perception-aware model. The AI then analyzes the images to track the shuttlecock’s trajectory and predict its future position. The perception-aware model helps to compensate for motion-induced errors, ensuring the robot can accurately see the shuttlecock even during fast movements.
What is reinforcement learning, and how does it work for ANYmal-D?
Reinforcement learning (RL) is a type of AI training where the robot learns through trial and error. ANYmal-D is rewarded for accomplished shot returns and penalized for misses. Over time, through numerous rounds of “playing” and receiving feedback, the robot refines its movements, trajectory predictions, and decision-making until it learns to play the game effectively. An asymmetric actor-critic framework is used to optimize the limbs together, leading to coordinated whole-body motion.
Will robots replace human badminton players?
It’s unlikely that robots will entirely replace human badminton players anytime soon. While ANYmal-D demonstrates impressive capabilities, it still has limitations in factors such as shot power and reaction time. The focus of this technology will most likely be in the areas of athlete training, serving as a sparring partner, or aiding performance analysis, rather then directly competing in professional games. However, as the technology advances, we could see robot-only exhibitions.
What are the major challenges in developing athletic robots?
Key challenges include visual perception (tracking fast-moving objects), rapid reaction times, power and agility, and the ability to make strategic decisions. Replicating the adaptability and creativity of a human athlete is a complex task and requires hardware advancements in areas such as camera capabilities and actuator speed as well as algorithmic improvements in areas such as predictive modeling,and efficient motion planning
Besides badminton,what other fields can this technology be applied to?
The underlying technologies used in ANYmal-D have wider applications. The ETH Zurich researchers themselves highlight potential uses in dynamic tasks requiring advanced sensing and whole-body responses. This may include search-and-rescue operations, automated factory tasks (e.g.,object manipulation),and perhaps even exploring other sports where similar movements are critical. The flexible, end-to-end, reinforcement learning algorithm enables adaptability and transferability across various tasks.
how can I stay updated on the progress of AI in sports?
Follow reputable robotics and sports technology news outlets, subscribe to academic journals in the fields of AI and robotics, and keep an eye on announcements from research institutions developing these advanced technologies. Stay curious – the future of sports and robotics is dynamic!

